Our story begins with a mid-sized orthodontic laboratory in northern Europe that fabricates teen clear-aligners exclusively. The lab processes roughly 2 000 intra-oral scans every day, but its in-house engineering crew is tiny. Their specialists excel at biomechanical tooth movement—not at writing mesh-surgery code. Rising order volumes were starting to erode lead-time guarantees to clinics.
Because they serve a single, well-defined niche, the lab couldn’t justify a monolithic enterprise platform; instead, they wanted surgical-grade reliability inside a lightweight toolchain they already knew.
| Bottleneck | Symptom | Business Impact |
|---|---|---|
| Boolean failures on undercuts & thin ridges | 7–10 % of jaws crashed or produced self-intersections | Manual repair stole ~100 technician hours/week |
| Non-manifold leftovers after scan stitching | Printer-side STL rejects every 200 jobs | Costly re-build slots & overtime |
| Slow, single-core offsets | 18 min average “scan → print-job” | Failed next-day shipping SLA |
The lab’s CAD macro scripts used generic geometry kernels that were never designed for fine dental detail. Operators routinely babysat mesh fixes and re-export cycles.
No third-party baggage – our codebase contains zero external geometry libraries; every algorithm is authored in-house.
Stable, modern C++ core – we restrict ourselves to a dependable subset of the ISO standard, delivering deterministic behaviour vital for medical audits.
Plain C interface – the client could keep their Python-based orchestration layer and call our DLL like any other shared library.
A three-engineer team – the same people who design the math answer questions in chat; nothing is “escalated.”
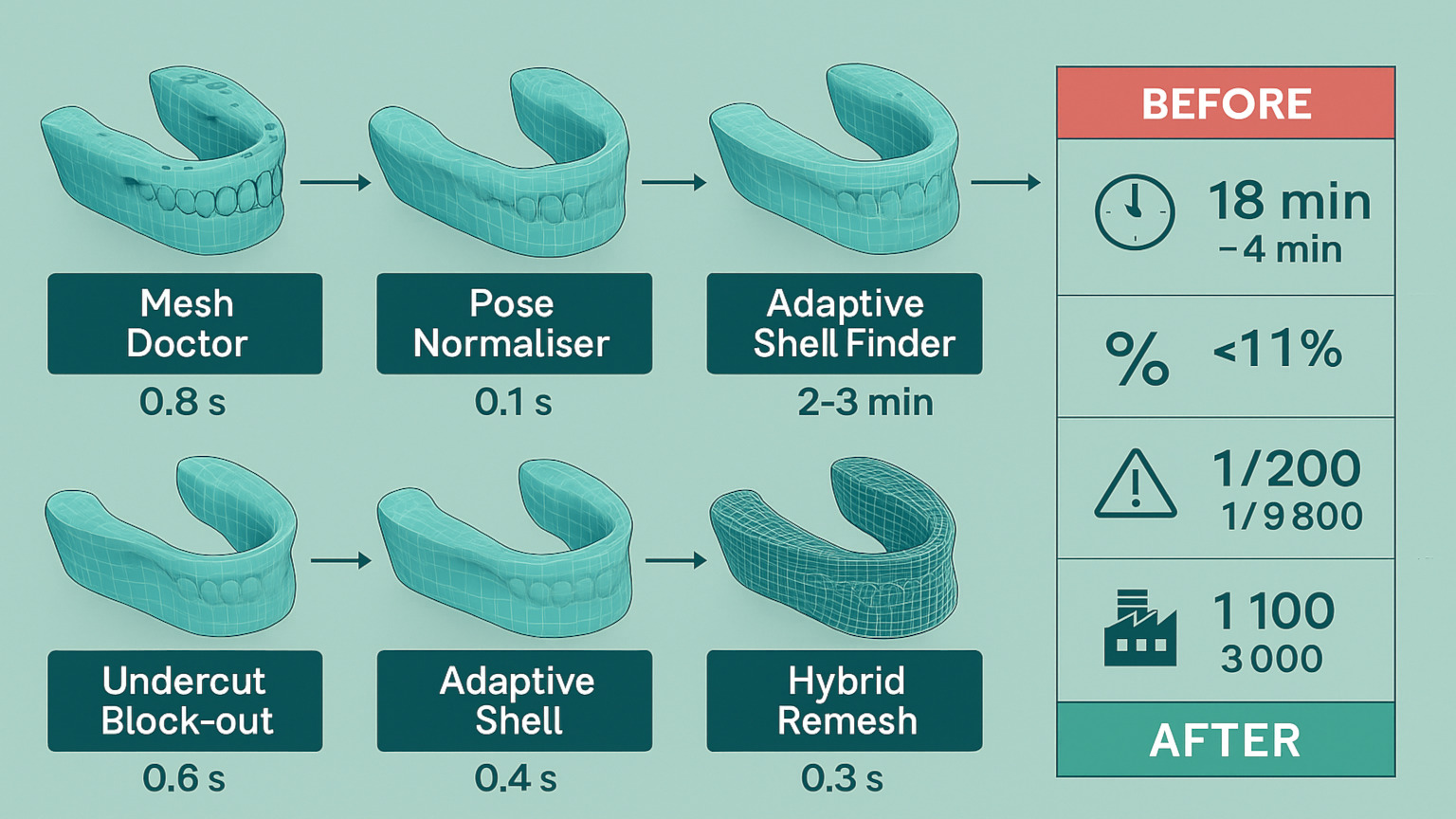
| Stage | Elf.3D Technique | What Makes It Different | Avg. Time / Upper Jaw |
|---|---|---|---|
| Mesh Doctor | Dual-graph hole closure + selective re-triangulation | Guarantees watertightness even for < 50 µm gaps; preserves occlusal cusps | 0.8 s |
| Pose Normaliser | Robust PCA over covariance ellipsoid | Locks a consistent coordinate frame, eliminating “flipped arch” surprises | 0.1 s |
| Undercut Block-out | Signed-distance flood on GPU | Carves thermo-forming traps while respecting root morphology | 0.6 s |
| Adaptive Shell | Fast-marching offset on triangle soup | 0.7 mm uniform wall, auto-resolves potential self-intersections | 0.4 s |
| Margin Line Finder | Geodesic gradient descent + live Bézier control | Detects gingival edge; technicians tweak with two-handle gizmo | 2–3 min if edited |
| Hybrid Remesh | Curvature-weighted edge split/collapse | Produces isotropic triangles; 40 % lighter files, faster printer slicing | 0.3 s |
The fully automated path clocks in at ≈ 4 seconds per jaw. Even when a technician spends a minute refining the margin, the pipeline still finishes comfortably under the five-minute target.
Key architecture note: every stage runs in the same compiled C++ module — no IPC hops, no version mismatches.
| Week | Milestone |
|---|---|
| 0–2 | Receipt of sample data sets, algorithm scoping |
| 3–6 | Prototype DLL with Mesh Doctor + Offset; lab integrates via Python and runs 500-jaw benchmark |
| 7–9 | Add Margin Finder UI widget using the C interface; on-site feedback loop |
| 10–12 | Validation, operator training, production rollout |
| Metric | Before | After |
|---|---|---|
| Avg. “scan → print-job” | 18 min | 4 min 12 s |
| Jobs needing manual patching | 27 % | < 1 % |
| Printer rejects (bad STL) | 1 / 200 | 1 / 9 800 |
| Daily throughput | 1 100 parts | 3 000 parts |
| Technician overtime | 22 h / week | < 3 h / week |
Boolean Robustness – Our surface–surface intersection uses an interval-stabbing scheme combined with filtered rational predicates, avoiding the degeneracies that plague generic kernels.
Mesh Repair Heuristics – We classify defects (holes, self-intersections, zero-area faces) and apply targeted fixes, rather than shotgun remeshing, thus retaining diagnostic landmarks.
Curvature-Aware Decimation – Edge-collapse cost is modulated by principal curvature, so incisors keep their sharp ridges while palatal vaults shed triangles freely, cutting STL size by up to 45 %.
Deterministic Offsets – The fast-marching method guarantees identical results across OS/hardware configurations—critical for regulatory traceability.
GPU-Assisted Distance Fields – Optional CUDA acceleration flips the undercut filter from 2.4 s CPU to 0.6 s GPU on a mid-range card, yet the fallback CPU path matches within 5 µm.
The new pipeline feels like a single click. Our technicians open a scan, blink, and the aligner shell is ready. The only time we intervene is when we want to nudge a margin line—never because the software broke.
Production Manager, Orthodontic Lab| Requirement | Big-Box Vendor | Elf.3D |
|---|---|---|
| Tailored algorithms | Fixed feature set | Written from scratch to spec |
| Ownership of IP | Annual licence | Source code escrowed to client |
| Response time | Tier-1 support queue | Direct chat with algorithm author |
| Integration surface | REST & desktop GUI only | Clean C API callable from any language |
| Total cost of ownership | Per-seat fees + hardware locks | Flat project fee, no runtime royalties |
The lab is now exploring chair-side tools that invert our distance-field logic to add material for bite-ramps and precision cuts. Thanks to the shared C interface, those experiments plug into the same codebase without refactoring.
About Elf.3D: We are a small team of three engineers and one project manager. Rather than selling the same software to everyone, we create new code for each partner and their specific data. If your 3-D workflow suffers from geometry issues that mainstream tools overlook, contact us at info@elf3d.com. We will start with a blank repository and craft a solution around your needs.